Moteur pas à pas 1.7A 12V 42Ncm (59.49oz de la NEMA 17 de 17HS4401 40mm. Dans) utilisé pour l'imprimante XYZ de la commande numérique par ordinateur 3D
Un moteur pas à pas hybride est une combinaison du type à reluctance variable et à un aimant permanent moteurs. Le rotor d'un moteur pas à pas hybride est axialement magnétisé comme un moteur pas à pas à un aimant permanent, et le redresseur active électromagnétiquement comme un moteur pas à pas à reluctance variable.
Comparé aux servomoteurs, les steppers hybrides ont l'avantage de la construction rocailleuse et simple ; fiabilité avec peu d'entretien ; couple élevé à de basses vitesses ; et aucun besoin de dispositifs de retour de position ou de vitesse.
Un petit angle typique d'étape d'un de pas hybride est 1.8° (parfois 0.9°). Ceci correspond à 200 (ou 400) étapes par révolution. Pour obtenir une plus haute précision un mécanisme ou une boîte de vitesse de réduction peut être utilisé.
En raison de la disponibilité des résolutions inférieures d'étape de 0.9°, de 1.8°, ou de 3.6°, la norme étant 1.8°. Ils montrent la charge statique élevée et les caractéristiques dynamiques de couple (réponse pour commencer, s'arrêter, et renverser). Par conséquent, des moteurs pas à pas hybrides sont utilisés dans divers industriel et les applications domestiques aiment, robotique.
spécifications 1.Genaral des moteurs pas à pas de la NEMA 17 :
| Nom |
moteur d'étape de la NEMA 17 |
| Modèle |
JK42HS40-1704-13A |
| Type de moteur |
moteur de progression hybride |
| Tension évaluée |
2.55V |
| Tenir le couple |
42Ncm (59.49oz.in) |
| Angle d'étape |
1,8 degrés |
| Actuel |
1.7A |
| Axe |
axe de D-coupe de 5mm |
| Utilisation |
Machines de gravure, machines de laser, machines-outilles à commande numérique, machines de textile et de vêtement, matériel médical, appareil de mesure, installation de fabrication électronique, machines d'emballage et d'autres divers équipement et instruments d'automation. |
spécifications 2.Electrical de moteur de progression (1,8 degrés) :
| Modèle non. |
Angle d'étape |
Longueur de moteur |
Actuel
/Phase
|
Résistance
/Phase
|
Inductance
/Phase
|
Tenir le couple |
# des avances |
Couple de détente |
Inertie de rotor |
La masse |
| (°) |
(L) millimètre |
|
Ω |
MH |
kg.cm |
Non. |
g.cm |
g.cm2 |
Kilogramme |
| JK42HS25-0404 |
1,8 |
25 |
0,4 |
24 |
36 |
1,8 |
4 |
75 |
20 |
0,15 |
| JK42HS28-0504 |
1,8 |
28 |
0,5 |
20 |
21 |
1,5 |
4 |
85 |
24 |
0,22 |
| JK42HS34-1334 |
1,8 |
34 |
1,33 |
2,1 |
2,5 |
2,2 |
4 |
120 |
34 |
0,22 |
| JK42HS34-0406 |
1,8 |
34 |
0,4 |
24 |
15 |
1,6 |
6 |
120 |
34 |
0,22 |
| JK42HS34-0956 |
1,8 |
34 |
0,95 |
4,2 |
2,5 |
1,6 |
6 |
120 |
34 |
0,22 |
| JK42HS40-0406 |
1,8 |
40 |
0,4 |
30 |
30 |
2,6 |
6 |
150 |
54 |
0,28 |
| JK42HS40-1684 |
1,8 |
40 |
1,68 |
1,65 |
3,2 |
3,6 |
4 |
150 |
54 |
0,28 |
| JK42HS40-1206 |
1,8 |
40 |
1,2 |
3 |
2,7 |
2,9 |
6 |
150 |
54 |
0,28 |
| JK42HS48-0406 |
1,8 |
48 |
0,4 |
30 |
25 |
3,1 |
6 |
260 |
68 |
0,35 |
| JK42HS48-1684 |
1,8 |
48 |
1,68 |
1,65 |
2,8 |
4,4 |
4 |
260 |
68 |
0,35 |
| JK42HS48-1206 |
1,8 |
48 |
1,2 |
3,3 |
2,8 |
3,17 |
6 |
260 |
68 |
0,35 |
| JK42HS60-0406 |
1,8 |
60 |
0,4 |
30 |
39 |
6,5 |
6 |
280 |
102 |
0,5 |
| JK42HS60-1704 |
1,8 |
60 |
1,7 |
3 |
6,2 |
7,3 |
4 |
280 |
102 |
0,5 |
| JK42HS60-1206 |
1,8 |
60 |
1,2 |
6 |
7 |
5,6 |
6 |
280 |
102 |
0,5 |
spécifications 3.Electrical de moteur de progression (0,9 degrés) :
| Modèle non. |
Angle d'étape |
Longueur de moteur |
Actuel
/Phase
|
Résistance
/Phase
|
Inductance
/Phase
|
Tenir le couple |
# des avances |
Couple de détente |
Inertie de rotor |
La masse |
| (°) |
(L) millimètre |
|
Ω |
MH |
kg.cm |
Non. |
g.cm |
g.cm2 |
Kilogramme |
| JK42HM34-1334 |
0,9 |
34 |
1,33 |
2,1 |
4,2 |
2,2 |
4 |
200 |
35 |
0,22 |
| JK42HM34-0316 |
0,9 |
34 |
0,31 |
38,5 |
33 |
1,58 |
6 |
200 |
35 |
0,22 |
| JK42HM34-0956 |
0,9 |
34 |
0,95 |
4,2 |
4,0 |
1,58 |
6 |
200 |
35 |
0,22 |
| JK42HM40-1684 |
0,9 |
40 |
1,68 |
1,65 |
3,2 |
3,3 |
4 |
220 |
54 |
0,28 |
| JK42HM40-0406 |
0,9 |
40 |
0,4 |
30 |
30 |
2,59 |
6 |
220 |
54 |
0,28 |
| JK42HM40-1206 |
0,9 |
40 |
1,2 |
3,3 |
3,4 |
2,59 |
6 |
220 |
54 |
0,28 |
| JK42HM48-1684 |
0,9 |
48 |
1,68 |
1,65 |
4,1 |
4,4 |
4 |
250 |
68 |
0,35 |
| JK42HM48-1206 |
0,9 |
48 |
1,2 |
3,3 |
4 |
3,17 |
6 |
250 |
68 |
0,35 |
| JK42HM48-0406 |
0,9 |
48 |
0,4 |
30 |
38 |
3,17 |
6 |
250 |
68 |
0,35 |
| JK42HM60-1684 |
0,9 |
60 |
1,68 |
1,65 |
5,0 |
5,5 |
4 |
270 |
106 |
0,55 |
spécifications 4.Electrical de moteur pas à pas de boucle bloquée :
| Modèle non. |
Angle d'étape |
Longueur de moteur |
Actuel
/Phase
|
Résistance
/Phase
|
Inductance
/Phase
|
Tenir le couple |
# des avances |
Couple de détente |
Inertie de rotor |
La masse |
| (°) |
(L) millimètre |
|
Ω |
MH |
kg.cm |
Non. |
g.cm |
g.cm2 |
Kilogramme |
| JK42HS34-1334BED-01 |
1,8 |
34 |
1,33 |
2,1 |
2,5 |
2,6 |
4 |
120 |
34 |
0,22 |
| JK42HS40-1704BED-02 |
1,8 |
40 |
1,7 |
1,5 |
2,3 |
4,2 |
4 |
150 |
54 |
0,28 |
| JK42HS48-1684BED-02 |
1,8 |
48 |
1,68 |
1,65 |
2,8 |
5 |
4 |
260 |
68 |
0,38 |
| JK42HS60-1704BF-ED-01 |
1,8 |
60 |
1,7 |
3 |
6,2 |
7,3 |
4 |
280 |
102 |
0,55 |
spécifications 5.Electrical de moteur pas à pas de frein de la NEMA 17 :
| Modèle non. |
Angle d'étape |
Longueur de moteur |
Actuel
/Phase
|
Résistance
/Phase
|
Inductance
/Phase
|
Tenir le couple |
# des avances |
Couple de détente |
Inertie de rotor |
La masse |
| (°) |
(L) millimètre |
|
Ω |
MH |
kg.cm |
Non. |
g.cm |
g.cm2 |
Kilogramme |
| JK42HS34-1334BK0.5 |
1,8 |
34 |
1,33 |
2,1 |
2,5 |
2,2 |
4 |
120 |
34 |
0,4 |
| JK42HS40-1684BK0.5 |
1,8 |
40 |
1,68 |
1,65 |
3,2 |
3,6 |
4 |
150 |
54 |
0,46 |
| JK42HS48-2504BK0.5 |
1,8 |
48 |
2,5 |
1,6 |
1,8 |
5,0 |
4 |
260 |
68 |
0,53 |
| JK42HS60-1504BK0.5 |
1,8 |
60 |
1,5 |
4,0 |
6,0 |
7,5 |
4 |
280 |
102 |
0,68 |
spécifications 6.Electrical de la vis linéaire de la NEMA 17 :
| Diamètre de vis |
Avance de vis |
Lancement de vis |
Voyage par étape |
Diamètre de vis |
Avance de vis |
Lancement de vis |
Voyage par étape |
| millimètre |
millimètre |
millimètre |
millimètre |
millimètre |
millimètre |
millimètre |
millimètre |
| Tr5 |
1 |
1 |
0,005 |
Tr8 |
8 |
2 |
0,04 |
| 2 |
1 |
0,01 |
10 |
2 |
0,05 |
| Tr6 |
2 |
1 |
0,01 |
12 |
2 |
0,06 |
| 4 |
1 |
0,02 |
14 |
2 |
0,07 |
| 6 |
1 |
0,03 |
Tr10 |
2 |
2 |
0,01 |
| 12 |
2 |
0,06 |
3 |
1,5 |
0,015 |
| Tr8 |
1 |
1 |
0,005 |
4 |
2 |
0,02 |
| 2 |
2 |
0,01 |
8 |
2 |
0,04 |
| 3 |
1,5 |
0,015 |
10 |
2 |
0,05 |
| 4 |
2 |
0,02 |
12 |
2 |
0,06 |
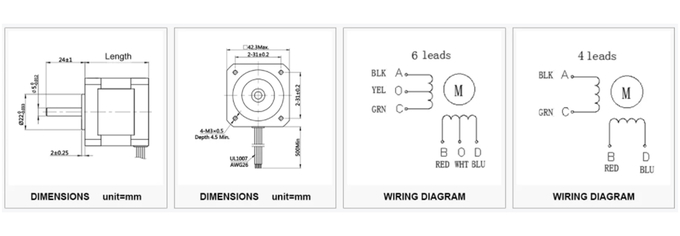
7.Drawing de moteur d'étape de 42mm :
conception 8.Customized de moteur de progression :

type de l'axe 9.Different :

10.Advantages de moteur pas à pas hybride
- Coût bas pour le contrôle réalisé
- Couple élevé aux vitesses de démarrage et basses
- Rugosité
- Simplicité de construction
- Peut fonctionner dans un système de contrôle de boucle ouverte
- Bas entretien
- Moins probable pour caler ou glisser
- Travaillera dans n'importe quel environnement
- Peut être employé en robotique dans un répandu.
- Fiabilité élevée
- L'angle de rotation du moteur est proportionnel à l'impulsion d'entrée.
- Le moteur a le plein couple à l'arrêt (si les enroulements activent)
- Le positionnement et la répétabilité précis du mouvement puisque les bons moteurs pas à pas ont une exactitude de 3-5% d'une étape et de cette erreur est non-cumulatif d'une étape au prochain.
- Excellente réponse à commencer/arrêt/s'inversant.
- Très fiable puisqu'il n'y a aucun balai de contact dans le moteur. Par conséquent, la vie du moteur dépend simplement de la vie de l'incidence.
- La réponse de moteurs aux impulsions d'entrée numérique fournit le contrôle de boucle ouverte, rendre le moteur plus simple et moins coûteux pour commander.
- Il est possible de réaliser la rotation synchrone très à vitesse réduite avec une charge qui est directement couplée à l'axe.
- Un large éventail de vitesses de rotation peuvent être réalisées car la vitesse est proportionnelle à la fréquence des impulsions d'entrée.
11.Applications des moteurs d'étape :
Car le moteur pas à pas sont à commande numérique utilisant une impulsion d'entrée, ils conviennent pour l'usage avec les systèmes commandés par ordinateur.
Ils sont employés dans le contrôle numérique des machines-outils.
Utilisé dans des systèmes d'entraînement de bande magnétique, des lecteurs de disques souples, des imprimantes et des montres électriques.
Le moteur pas à pas emploient également en traceur DE X/Y et robotique.
Il a l'application large dans les industries textiles et les fabrications de circuit intégré.
Les autres applications du moteur pas à pas sont dans des vaisseaux spatiaux lancés pour des explorations scientifiques des planètes etc.
Ces moteurs trouvent également un grand choix d'applications commerciales, médicales et militaires et également utilisé dans la production des films de la science-fiction.
Des moteurs pas à pas des microwatts sont utilisés dans les montres-bracelet.
Dans la machine-outil, les moteurs pas à pas avec des estimations de plusieurs dizaines de kilowatts est utilisés.

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!