La NEMA 17 23 a intégré le moteur pas à pas servo 2N.m 3N.m 4A 5A boucle fermée de 2 phases de pas avec la communication CANopen/RS485
Technicalcharacteristics :
1. Aucune étape perdue, positionnement précis
2. Autobus RS-485 standard de soutien et autobus de BOÎTE
3. Protocole standard de Modbus-RTU de soutien et protocole de CANopen
4. Trois modes de contrôle avec le mode de position, le mode de vitesse et le mode d'autoguidage
5. Signal d'entrée intégrée d'onde entretenue, de CCW, de commutateur E/S avec 5V ou 24V pour la limite et la référence à autodirecteur
6. Un signal de sortie de signal de frein de COUPURE
7. La connexion réseau RJ45 standard de l'esclave par le câble de twisted pair peut être reliée
8. La fréquence de transmission est plus soutenue par 1Mbps, et la distance de transmission est jusqu'à le 1KM le plus lointain
9. moteur évalué d'entraînement de couple de 100%
10. Technologie actuelle variable de contrôle, efficacité à forte intensité
11. Petite vibration et bon fonctionnement à vitesse réduite
12. Accélération intégrée et contrôle de décélération pour améliorer le début et pour arrêter la douceur
13. Les utilisateurs peuvent définir leurs propres subdivisions
14. 1000 - fil et 2500 - encodeurs compatibles de fil
15. Des paramètres généraux d'application n'ont pas besoin d'être ajustés
16. Perdez la protection de phase, au-dessus de la protection actuelle, au-dessus de la protection de tension et au-dessus de la protection d'erreur de position
1. la NEMA hybride 23 de 57mm a intégré des spécifications de Genaral de moteur pas à pas :
| Nom |
la NEMA 23 a intégré le moteur pas à pas |
| Modèle |
moteur pas à pas intégré avec l'encodeur |
| Type de moteur |
moteur pas à pas intégré de vis sans fin |
| Tension évaluée |
NEMA 17 (24V - 36V) ; NEMA 23 (24V - 50V) |
| Tenir le couple |
0.48N.m / 0.72N.m/1.2N.m/2.2N.m/3N.m |
| Longueur du corps |
NEMA 17 (47mm/60mm) ; NEMA 23 (56mm/80mm/101mm) |
| Actuel |
NEMA 17 (0.8A - 2A) ; NEMA 23 (4A - 5A) |
| Axe |
axe de moteur de 5mm ou de 8mm |
| Contrôle de soutien |
CANopen CiA402/RS485 MODBUS |
| Caractéristiques |
Canopen/RS485 23 moteurs servo intégrés d'étape de NEMA 17 ont produit 3NM avec le système de pas de boucle bloquée de l'encodeur 1000Line |
2, caractéristiques de conducteur intégré de contrôleur de moteur pas à pas :
1) : Une nouvelle génération de technologie à 32 bits de DSP.
2) : Protocole standard de soutien MODBUS-RTU.
3) : terminal de fonction d'entrée de 4 manières, terminal bidirectionnel de fonction de sortie.
4) : Le délabrement de couple est réduit, et la vitesse peut atteindre 3000rpm.
5) : Sortie intégrée d'alarme pour le contrôle faciles.
6) : Ajustez intelligemment actuel, réduisez la vibration, le bruit et la chaleur, et l'efficacité d'augmentation de 35%.
7) : Chaîne de tension : DC24~50V.
8) : 16 subdivisions réglables, le défaut est 1000pulse/r.
9) : Excellente grande vitesse et rigidité, intégration parfaite de servo et de pas.
10) : Avec la surtension, le sousvoltage, la surintensité et d'autres fonctions de protection.
11) : Conception intégrée avec le moteur d'entraînement. Installation facile, petite empreinte de pas et câblage simple.
3, application de moteur pas à pas intégré d'entraînement :
L'impression, l'AOI, la liaison de panneau, l'équipement de transfert, etc. en carte PCB ont rapporté l'équipement ; équipement relatif de caméra tel que la caméra et l'empreinte digitale ; machine en cristal solide, machine à connecter de fil, machine de distribution, séparateur de faisceau, et machine de bande de paquet dans l'emballage.
4, des spécifications générales de la NEMA 23 ont intégré le moteur pas à pas :
| Spécifications |
Série d'ISM57-R |
| Unité |
Minimum |
Typique |
Maximum |
| Courant de sortie |
|
1,8 |
- |
4 |
| Tension d'entrée |
Volts continu |
24 |
36 |
50 |
| Courant d'entrée évalué |
mA |
10 |
10 |
50 |
| Tension d'entrée évaluée |
V |
- |
24 |
24 |
| Fréquence d'impulsion |
kilohertz |
0 |
- |
200 |
| Résistance d'isolation |
MΩ |
100 |
- |
- |
5, données de Techical :
| Données de Techical |
| Nom |
Unité |
ISM57-R1x |
ISM57-R2x |
ISM57-R3x |
| Phase |
phase |
2 |
2 |
2 |
| Angle d'étape |
° |
1,8 |
1,8 |
1,8 |
| Tension évaluée |
V (C.C) |
24~50 |
24~50 |
24~50 |
| Courant de sortie |
|
4 |
5 |
5 |
| Tenir le couple |
N.m |
1,2 |
2,2 |
3 |
| Longueur de moteur |
millimètre |
56 |
80 |
101 |
| Catégorie d'isolation |
- |
B |
B |
B |
| Température de fonctionnement |
℃ |
0~55 |
0~55 |
0~55 |
6, description terminale :
| Description terminale |
|
| Pin |
Fonction |
Note |
Schéma d'interface |
| PWR |
Indicateur de puissance |
Indicateur de mise en marche |
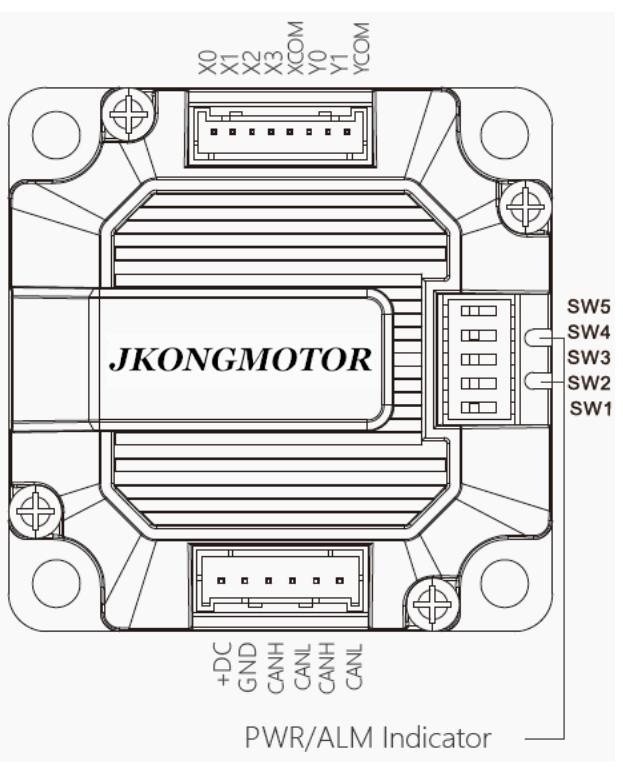 |
| ALM |
Indicateur d'alarme |
Alarme pêchant l'indicateur |
| X0-X3 |
terminal de 4 entrées |
Terminal d'entrée-sortie, alimentation d'énergie de signal 24V, appui NPN et modes de câblage de PNP deux, modification terminale de logiciel de fonction de soutien |
| XCOM |
Entrée commune |
| Y0-Y1 |
terminal de sortie 2 |
| YCOM |
Sortie commune |
| B |
Interface de communication RS485 1 |
2 ensembles d'interface de communication RS485, utilisés pour dedans et connexion, vitesse baud de défaut est 115200, format de données est : données à 8 bits, aucune clef de contrôle, 1 bit d'arre4t. |
| A+ |
| B |
Interface de communication RS485 2 |
| A+ |
| +DC |
Terminal positif de puissance fournie |
DC24~50V |
| LA terre |
Terminal négatif de puissance fournie |
7, terminal d'entrée-sortie :
| Terminal d'entrée-sortie : |
| Pin |
Nom |
Fonction |
| X0 |
Terminal d'entrée |
Terminal d'entrée-sortie, alimentation d'énergie de signal 24V, appui NPN et modes de câblage de PNP deux, modification terminale de logiciel de fonction de soutien |
| X1 |
| X2 |
| X3 |
| XCOM |
Terminal commun d'entrée |
| Y0 |
Terminal de sortie |
Le terminal de sortie, le courant maximum d'entraînement est 50mA, modificatio terminal de logiciel de fonction de soutien |
| Y1 |
| YCOM |
Terminal de sortie commun |
8, arrangements d'interrupteur à positions multiples :
| Arrangements d'interrupteur à positions multiples : |
| Pin |
Signe |
Fonction |
| 1 |
SW1 |
SW1 : Résistance terminale |
| 2 |
SW2 |
SW2-5 : Positionnement d'adresse |
| 3 |
SW3 |
| 4 |
SW4 |
| 5 |
SW5 |
9, arrangement de port de puissance :
| Arrangement de port de puissance : |
| Pin |
Nom |
Fonction |
| B |
Port de communication |
Port de communication de MODBUS |
| A+ |
| B |
| A+ |
| LA terre |
Port de puissance |
C.C : 24V~ 50V |
| +DC |
10, libération d'alarme :
| Libération d'alarme : |
| Code d'erreur |
L'information d'erreur |
Voyant d'alarme d'ALM |
Rajustement |
| Err1 : (0x01) |
Surintensité ou court-circuit entre phases |
![]() |
Remise de puissance-vers le bas |
| Err2 : (0x02) |
La tension d'alimentation électrique est trop haute |
![]() |
Serrure/réinitialisation automatique |
| Err3 : (0x03) |
La tension d'alimentation électrique est si basse |
![]() |
Serrure/réinitialisation automatique |
| Err5 : (0x05) |
Hors du torlance |
![]() |
Remise de puissance-vers le bas |
11, environnement d'utilisation :
| Environnement d'utilisation : |
| Méthode de refroidissement |
Refroidissement de radiateur |
| Environnement d'utilisation : |
Environnement d'utilisation |
Gardez à partir de l'autre équipement de chauffage aussi loin que possible, évitez la poussière, brouillard d'huile, gaz corrosif, endroits forts de vibration, interdisez le gaz inflammable et la poussière conductrice |
| La température |
0℃ | 50℃ |
| Humidité |
40 | Rhésus de 90 % (aucune condensation) |
| Choc |
10 | 55Hz/0.15mm |
| Température de stockage |
-20℃ | +80℃ |
12, produit dimensionne : (Unit=mm)
![]()
13, conception adaptée aux besoins du client :
Si ce moteur ne s'assortissent pas avec votre demande. Sentez svp librement pour entrer en contact avec nous, nous peut faire l'axe adapté aux besoins du client/enroulement/bride de support/câble/connecteur/encodeur/frein/boîte de vitesse et d'autres. Nous voulons bien des travaux côte à côte avec vous et votre équipe pour concevoir un moteur qui adaptera les besoins précis de votre application. Tous les ingénierie et appui est faite sur place.
![]()
14, types adaptés aux besoins du client d'axe :
![]()
![]()

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!










