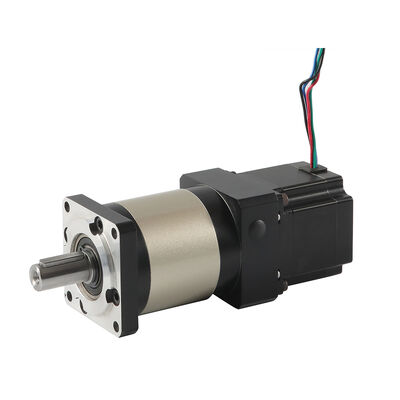
Jkongmotor – moteur pas à pas hybride bipolaire, OEM ODM, engrenage unipolaire, avec boîte de vitesses, encodeur, frein, pilote intégré
Jkongmotor fournit des professionnelsSolutions de moteurs pas à pas hybrides OEM et ODMmettant en vedetteoptions d'enroulement bipolaire et unipolairecombiné avecboîtes de vitesses, encodeurs, freins et pilotes intégrés. Ces motoréducteurs pas à pas sont conçus pour fournir un couple élevé, un positionnement précis, une intégration compacte et une fiabilité industrielle à long terme.
Présentation du produit
Les moteurs pas à pas hybrides Jkongmotor intègrent un moteur pas à pas de haute précision avec un moteur pas à pas adaptéréducteur planétaire, droit ou à vis sans fin, et peut être en outre équipé deretour d'encodeur, systèmes de freinage électromagnétiques et pilotes intégrés. Cette conception tout-en-un réduit la complexité du système, réduit le temps d'installation et améliore la stabilité du contrôle de mouvement.
Principales fonctionnalités
-
Technologie de moteur pas à pas hybridepour un couple élevé et un pas précis
-
Configurations bipolaires et unipolairespour correspondre à différents systèmes de contrôle
-
Boîte de vitesses intégréepour la multiplication du couple et l'optimisation de la vitesse
-
Encodeur en optionpour le contrôle en boucle fermée et la surveillance de position
-
Frein en optionpour le maintien de charge et les applications critiques en matière de sécurité
-
Option de pilote intégrépour minimiser le câblage et l'espace dans l'armoire
-
Structure compacte et modulairepour une installation et un entretien faciles
-
Faible bruit, faibles vibrations, haute efficacité
Options de personnalisation OEM et ODM
-
Type de boîte de vitesses, rapport, jeu et lubrification
-
Taille du châssis du moteur (NEMA 8/11/14/17/23/24/34 et personnalisé)
-
Couple de sortie, plage de vitesse et angle de pas
-
Type de codeur (incrémental, magnétique, optique ou absolu)
-
Tension de freinage, couple de maintien et conception à sécurité intégrée
-
Paramètres du pilote intégrés, interface de communication et niveau de protection
-
Conception de l'arbre, bride de montage, personnalisation des câbles et des connecteurs
-
Exigences particulières : indice de protection IP, résistance à la corrosion, enroulement à haute température
Avantages en termes de performances
-
Couple de sortie élevé à basse vitesseidéal pour une transmission de précision
-
Précision de positionnement amélioréeavec boîte de vitesses et retour d'encodeur
-
Intégration du système simplifiéegrâce à des combinaisons moteur-réducteur-pilote
-
Fonctionnement continu fiablepour environnements industriels
-
Conception flexibleadaptable aux machines standards et spécialisées
Applications typiques
-
Robotique et robots collaboratifs
-
Automatisation industrielle et équipements CNC
-
Machines d'emballage, d'étiquetage et d'impression
-
Appareils médicaux et de laboratoire
-
AGV, convoyeurs et systèmes logistiques intelligents
-
Équipements textiles, de transformation des aliments et d'inspection
Capacité de fabrication OEM et ODM de Jkongmotor
Offres Jkongmotor complètesServices de motoréducteurs pas à pas personnalisés OEM et ODM, couvrant l'évaluation de la conception, le développement de prototypes, les tests de performances et la production de masse. Notre équipe d'ingénierie travaille en étroite collaboration avec les clients pour fournir des solutions spécifiques aux applications qui améliorent l'efficacité, la fiabilité et les performances globales du système.
Choisissez Jkongmotorpour professionnel, personnalisableMotoréducteurs pas à pas hybrides avec boîte de vitesses, encodeur, frein et pilote intégré— conçu pour alimenter vos projets d'automatisation avec précision et confiance.
Moteurs pas à pas Nema 8 :
| Numéro de modèle. |
Angle de pas |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Masse |
| (°) |
(L)mm |
UN |
Ω |
mH |
g.cm |
Non. |
kilos |
| JK20HS30-0604 |
1.8 |
30 |
0,6 |
18 |
3.2 |
180 |
4 |
0,06 |
| JK20HS33-0604 |
1.8 |
33 |
0,6 |
6.5 |
1.7 |
200 |
4 |
0,07 |
| JK20HS38-0604 |
1.8 |
38 |
0,6 |
10 |
5.5 |
300 |
4 |
0,08 |
| JK20HS42-0804 |
1.8 |
42 |
0,8 |
5.4 |
1,5 |
400 |
4 |
0,09 |
Moteurs pas à pas Nema 11 :
| MNuméro de modèle. |
Angle de marche |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Inertie du rotor |
Masse |
| (°) |
(L)mm |
UN |
Ω |
mH |
g.cm |
Non. |
g.cm2 |
Kilogrammes |
| JK28HS32-0674 |
1.8 |
32 |
0,67 |
5.6 |
3.4 |
600 |
4 |
9 |
0,11 |
| JK28HS32-0956 |
1.8 |
32 |
0,95 |
2.8 |
0,8 |
430 |
6 |
9 |
0,11 |
| JK28HS45-0956 |
1.8 |
45 |
0,95 |
3.4 |
1.2 |
750 |
6 |
12 |
0,14 |
| JK28HS45-0674 |
1.8 |
45 |
0,67 |
6.8 |
4.9 |
950 |
4 |
12 |
0,14 |
| JK28HS51-0956 |
1.8 |
51 |
0,95 |
4.6 |
1.8 |
900 |
6 |
18 |
0,2 |
| JK28HS51-0674 |
1.8 |
51 |
0,67 |
9.2 |
7.2 |
1200 |
4 |
18 |
0,2 |
Moteurs pas à pas Nema 14 :
| Numéro de modèle. |
Angle de pas |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Couple de détente |
Inertie du rotor |
Masse |
| (°) |
(L)mm |
UN |
Ω |
mH |
g.cm |
Non. |
g.cm |
g.cm2 |
Kilogrammes |
| JK35HS28-0504 |
1.8 |
28 |
0,5 |
20 |
14 |
1000 |
4 |
80 |
11 |
0,13 |
| JK35HS34-1004 |
1.8 |
34 |
1 |
2.7 |
4.3 |
1400 |
4 |
100 |
13 |
0,17 |
| JK35HS42-1004 |
1.8 |
42 |
1 |
3.8 |
3.5 |
2000 |
4 |
125 |
23 |
0,22 |
Moteurs pas à pas Nema 17 :
| Numéro de modèle. |
Angle de pas |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Couple de détente |
Inertie du rotor |
Masse |
| (°) |
(L)mm |
UN |
Ω |
mH |
kg.cm |
Non. |
g.cm |
g.cm2 |
Kilogrammes |
| JK42HS25-0404 |
1.8 |
25 |
0,4 |
24 |
36 |
1.8 |
4 |
75 |
20 |
0,15 |
| JK42HS28-0504 |
1.8 |
28 |
0,5 |
20 |
21 |
1,5 |
4 |
85 |
24 |
0,22 |
| JK42HS34-1334 |
1.8 |
34 |
1,33 |
2.1 |
2.5 |
2.2 |
4 |
120 |
34 |
0,22 |
| JK42HS34-0406 |
1.8 |
34 |
0,4 |
24 |
15 |
1.6 |
6 |
120 |
34 |
0,22 |
| JK42HS34-0956 |
1.8 |
34 |
0,95 |
4.2 |
2.5 |
1.6 |
6 |
120 |
34 |
0,22 |
| JK42HS40-0406 |
1.8 |
40 |
0,4 |
30 |
30 |
2.6 |
6 |
150 |
54 |
0,28 |
| JK42HS40-1684 |
1.8 |
40 |
1,68 |
1,65 |
3.2 |
3.6 |
4 |
150 |
54 |
0,28 |
| JK42HS40-1206 |
1.8 |
40 |
1.2 |
3 |
2.7 |
2.9 |
6 |
150 |
54 |
0,28 |
| JK42HS48-0406 |
1.8 |
48 |
0,4 |
30 |
25 |
3.1 |
6 |
260 |
68 |
0,35 |
| JK42HS48-1684 |
1.8 |
48 |
1,68 |
1,65 |
2.8 |
4.4 |
4 |
260 |
68 |
0,35 |
| JK42HS48-1206 |
1.8 |
48 |
1.2 |
3.3 |
2.8 |
3.17 |
6 |
260 |
68 |
0,35 |
| JK42HS60-0406 |
1.8 |
60 |
0,4 |
30 |
39 |
6.5 |
6 |
280 |
102 |
0,5 |
| JK42HS60-1704 |
1.8 |
60 |
1.7 |
3 |
6.2 |
7.3 |
4 |
280 |
102 |
0,5 |
| JK42HS60-1206 |
1.8 |
60 |
1.2 |
6 |
7 |
5.6 |
6 |
280 |
102 |
0,5 |
Moteurs pas à pas Nema 23 :
| Numéro de modèle. |
Angle de pas |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Couple de détente |
Inertie du rotor |
Masse |
| (°) |
(L)mm |
UN |
Ω |
mH |
Nm |
Non. |
g.cm |
g.cm2 |
Kilogrammes |
| JK57HS41-1006 |
1.8 |
41 |
1 |
7.1 |
8 |
0,48 |
6 |
250 |
150 |
0,47 |
| JK57HS41-2008 |
1.8 |
41 |
2 |
1.4 |
1.4 |
0,39 |
8 |
250 |
150 |
0,47 |
| JK57HS41-2804 |
1.8 |
41 |
2.8 |
0,7 |
1.4 |
0,55 |
4 |
250 |
150 |
0,47 |
| JK57HS51-1006 |
1.8 |
51 |
1 |
6.6 |
8.2 |
0,72 |
6 |
300 |
230 |
0,59 |
| JK57HS51-2008 |
1.8 |
51 |
2 |
1.8 |
2.7 |
0,9 |
8 |
300 |
230 |
0,59 |
| JK57HS51-2804 |
1.8 |
51 |
2.8 |
0,83 |
2.2 |
1.01 |
4 |
300 |
230 |
0,59 |
| JK57HS56-2006 |
1.8 |
56 |
2 |
1.8 |
2.5 |
0,9 |
6 |
350 |
280 |
0,68 |
| JK57HS56-2108 |
1.8 |
56 |
2.1 |
1.8 |
2.5 |
1 |
8 |
350 |
280 |
0,68 |
| JK57HS56-2804 |
1.8 |
56 |
2.8 |
0,9 |
2.5 |
1.2 |
4 |
350 |
280 |
0,68 |
| JK57HS64-2804 |
1.8 |
64 |
2.8 |
0,8 |
2.3 |
1 |
4 |
400 |
300 |
0,75 |
| JK57HS76-2804 |
1.8 |
76 |
2.8 |
1.1 |
3.6 |
1,89 |
4 |
600 |
440 |
1.1 |
| JK57HS76-3006 |
1.8 |
76 |
3 |
1 |
1.6 |
1,35 |
6 |
600 |
440 |
1.1 |
| JK57HS76-3008 |
1.8 |
76 |
3 |
1 |
1.8 |
1,5 |
8 |
600 |
440 |
1.1 |
| JK57HS82-3004 |
1.8 |
82 |
3 |
1.2 |
4 |
2.1 |
4 |
1000 |
600 |
1.2 |
| JK57HS82-4008 |
1.8 |
82 |
4 |
0,8 |
1.8 |
2 |
8 |
1000 |
600 |
1.2 |
| JK57HS82-4204 |
1.8 |
82 |
4.2 |
0,7 |
2.5 |
2.2 |
4 |
1000 |
600 |
1.2 |
| JK57HS100-4204 |
1.8 |
100 |
4.2 |
0,75 |
3 |
3 |
4 |
1100 |
700 |
1.3 |
| JK57HS112-3004 |
1.8 |
112 |
3 |
1.6 |
7.5 |
3 |
4 |
1200 |
800 |
1.4 |
| JK57HS112-4204 |
1.8 |
112 |
4.2 |
0,9 |
3.8 |
3.1 |
4 |
1200 |
800 |
1.4 |
Moteurs pas à pas Nema 24 :
| Numéro de modèle. |
Schéma de câblage |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Couple de détente |
Inertie du rotor |
Masse |
| (L)mm |
UN |
Ω |
mH |
Nm |
Non. |
g.cm |
g.cm2 |
Kilogrammes |
| JK60HS56-2008 |
Unipolaire |
56 |
2 |
1.8 |
3 |
1.17 |
8 |
700 |
300 |
0,77 |
| Parallèle |
2.8 |
0,9 |
3.6 |
1,65 |
| Tandem |
1.4 |
3.6 |
14.4 |
1,65 |
| JK60HS67-2008 |
Unipolaire |
67 |
2 |
2.4 |
4.6 |
1,5 |
8 |
900 |
570 |
1.2 |
| Parallèle |
2.8 |
1.2 |
4.6 |
2.1 |
| Tandem |
1.4 |
4.8 |
18.4 |
2.1 |
| JK60HS88-2008 |
Unipolaire |
88 |
2 |
3 |
6.8 |
2.2 |
8 |
1000 |
840 |
1.4 |
| Parallèle |
2.8 |
1,5 |
6.8 |
3.1 |
| Tandem |
1.4 |
6 |
27.2 |
3.1 |
| JK60HS100-2008 |
Unipolaire |
100 |
2 |
3.2 |
6.4 |
2.8 |
8 |
1100 |
980 |
1.7 |
| Parallèle |
2.8 |
1.6 |
6.4 |
4 |
| Tandem |
1.4 |
6.4 |
25.6 |
4 |
| JK60HS111-2008 |
Unipolaire |
111 |
2 |
4.4 |
8.3 |
3.2 |
8 |
1200 |
1120 |
1.9 |
| Parallèle |
2.8 |
2.2 |
8.3 |
4.5 |
| Tandem |
1.4 |
8.8 |
33.2 |
4.5 |
Moteurs pas à pas Nema 34 :
| Numéro de modèle. |
Angle de marche |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Couple de détente |
Inertie du rotor |
Masse |
| (°) |
(L)mm |
UN |
Ω |
mH |
Nm |
Non. |
Kg.cm |
g.cm2 |
Kilogrammes |
| JK86HS68-5904 |
1.8 |
67 |
5.9 |
0,28 |
1.7 |
3.4 |
4 |
0,8 |
1000 |
1.7 |
| JK86HS68-2808 |
1.8 |
67 |
2.8 |
1.4 |
3.9 |
3.4 |
8 |
0,8 |
1000 |
1.7 |
| JK86HS78-5504 |
1.8 |
78 |
5.5 |
0,46 |
4 |
4.6 |
4 |
1.2 |
1400 |
2.3 |
| JK86HS78-4208 |
1.8 |
78 |
4.2 |
0,75 |
3.4 |
4.6 |
8 |
1.2 |
1400 |
2.3 |
| JK86HS97-4504 |
1.8 |
97 |
4.5 |
0,66 |
3 |
5.8 |
4 |
1.7 |
2100 |
3 |
| JK86HS97-4008 |
1.8 |
97 |
4 |
0,98 |
4.1 |
4.7 |
8 |
1.7 |
2100 |
3 |
| JK86HS100-6004 |
1.8 |
100 |
6 |
0,36 |
2.8 |
7 |
4 |
1.9 |
2200 |
3.1 |
| JK86HS115-6004 |
1.8 |
115 |
6 |
0,6 |
6.5 |
8.7 |
4 |
2.4 |
2700 |
3.8 |
| JK86HS115-4208 |
1.8 |
115 |
4.2 |
0,9 |
6 |
8.7 |
8 |
2.4 |
2700 |
3.8 |
| JK86HS126-6004 |
1.8 |
126 |
6 |
0,58 |
6.5 |
6.3 |
4 |
2.9 |
3200 |
4.5 |
| JK86HS155-6004 |
1.8 |
155 |
6 |
0,68 |
9 |
13 |
4 |
3.6 |
4000 |
5.4 |
| JK86HS155-4208 |
1.8 |
155 |
4.2 |
1,25 |
8 |
12.2 |
8 |
3.6 |
4000 |
5.4 |
Moteurs pas à pas Nema 42 :
| Modèle |
Angle de pas |
Longueur du moteur |
Actuel |
Résistance |
Inductance |
Couple de maintien |
# de prospects |
Couple de détente |
Inertie du rotor |
Masse |
| (°) |
(L)mm |
UN |
Ω |
mH |
Nm |
Non. |
kg.cm |
g.cm2 |
Kilogrammes |
| JK110HS99-5504 |
1.8 |
99 |
5.5 |
0,9 |
12 |
11.2 |
4 |
3 |
5500 |
5 |
| JK110HS115-6004 |
1.8 |
115 |
6 |
0,48 |
7 |
12 |
4 |
4 |
7100 |
6 |
| JK110HS150-6504 |
1.8 |
150 |
6.5 |
0,8 |
15 |
21 |
4 |
5.9 |
10900 |
8.4 |
| JK110HS165-6004 |
1.8 |
165 |
6 |
0,9 |
14 |
24 |
4 |
6.6 |
12800 |
9.1 |
| JK110HS201-8004 |
1.8 |
201 |
8 |
0,67 |
12 |
28 |
4 |
7.5 |
16200 |
11.8 |
Moteurs pas à pas Nema 52 :
| Numéro de modèle. |
Tension de fonctionnement |
Courant nominal |
Résistance |
Inductance |
Couple de maintien |
Fréquence à vide |
Fréquence de démarrage |
Masse |
Longueur du moteur |
| VCC |
UN |
Ω |
mH |
Nm |
Non. |
g.cm |
Kilogrammes |
mm |
| JK130HS173-6004 |
80~325 |
6 |
0,75 |
12.6 |
25 |
25000 |
2300 |
13.3 |
173 |
| JK130HS229-6004 |
80~325 |
6 |
0,83 |
13.2 |
30 |
25000 |
2300 |
18 |
229 |
| JK130HS257-7004 |
80~325 |
7 |
0,73 |
11.7 |
40 |
23000 |
2200 |
19 |
257 |
| JK130HS285-7004 |
80~325 |
7 |
0,66 |
10 |
50 |
23000 |
2200 |
22,5 |
285 |

Profil de l'entreprise:
Changzhou Jkongmotor Co., Ltd était une zone industrielle de haute technologie à Changzhou, en Chine. Nos produits sont utilisés dans de nombreux types de machines, telles que les machines CNC d'imprimante 3D, les équipements médicaux, les équipements d'impression de tissage, etc.
JKONGMOTOR accueille chaleureusement les coopérations « OEM » et « ODM » et d'autres sociétés pour établir une coopération à long terme avec nous.
L'esprit d'entreprise de réputation sincère et bonne, a gagné la reconnaissance et le soutien des larges masses de clients, en même temps avec la communauté d'intérêts étroite des fournisseurs nationaux et étrangers, la société est entrée dans la phase de développement bénin, posant une base solide pour l'objectif stratégique de réaliser uniquement le développement durable de l'entreprise.
Spectacle d'équipements :
Flux de production :
Emballer:
Attestation :
Avantages
- Faible coût pour le contrôle obtenu
- Couple élevé au démarrage et basses vitesses
- Rugosité
- Simplicité de construction
- Peut fonctionner dans un système de contrôle en boucle ouverte
- Faible entretien
- Moins susceptible de caler ou de glisser
- Fonctionnera dans n’importe quel environnement
- Peut être utilisé en robotique à grande échelle.
- Haute fiabilité
- L'angle de rotation du moteur est proportionnel à l'impulsion d'entrée.
- Le moteur a le plein couple à l'arrêt (si les bobinages sont sous tension)
- Positionnement précis et répétabilité du mouvement puisque les bons moteurs pas à pas ont une précision de 3 à 5 % d'un pas et cette erreur n'est pas cumulable d'un pas à l'autre.
- Excellente réponse au démarrage/arrêt/inversion.
- Très fiable puisqu'il n'y a pas de balais de contact dans le moteur. La durée de vie du moteur dépend donc simplement de la durée de vie du roulement.
- La réponse du moteur aux impulsions d'entrée numérique fournit un contrôle en boucle ouverte, rendant le contrôle du moteur plus simple et moins coûteux.
- Il est possible d'obtenir une rotation synchrone à très faible vitesse avec une charge directement couplée à l'arbre.
- Une large gamme de vitesses de rotation peut être réalisée car la vitesse est proportionnelle à la fréquence des impulsions d'entrée.
6.FAQ
Q1 : Qu’en est-il de votre garantie ?
R : Nous garantissons un an. pour l'ordre maritime. est de 15 mois.
Q2 : Avez-vous des certificats ?
R : Oui, nous l’avons fait. Tous les moteurs ont été approuvés par CE et Rohs.
Q3 : Offrez-vous un service OEM ET ODM ?
R : Oui. Nous pouvons fournir des OEM et créer une conception personnalisée pour toute application spécifique.
Q4 : Comment votre distributeur de marque peut-il être ?
R : Nous vérifierons votre capacité et vous aiderons à promouvoir et à élargir le marché.
Q5 : Quel est le délai de livraison ?
R : Sauf commande spéciale. Pour les échantillons, généralement 7 à 15 jours ouvrables. pour la commande par lots. généralement 20-25 jours.
7.Applications de moteur pas à pas
- Comme les moteurs pas à pas sont contrôlés numériquement à l'aide d'une impulsion d'entrée, ils conviennent à une utilisation avec des systèmes contrôlés par ordinateur.
- Ils sont utilisés dans la commande numérique des machines-outils.
- Utilisé dans les lecteurs de bande, les lecteurs de disquettes, les imprimantes et les montres électriques.
- Le moteur pas à pas est également utilisé dans les traceurs XY et la robotique.
- Il a de nombreuses applications dans les industries textiles et la fabrication de circuits intégrés.
- Les autres applications du moteur pas à pas concernent les vaisseaux spatiaux lancés pour l'exploration scientifique des planètes, etc.
- Ces moteurs trouvent également diverses applications commerciales, médicales et militaires et sont également utilisés dans la production de films de science-fiction.
- Des moteurs pas à pas de microwatts sont utilisés dans les montres-bracelets.
- Dans la machine-outil, des moteurs pas à pas de plusieurs dizaines de kilowatts sont utilisés.

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!