
 |
| Lieu d'origine: | Jiangsu, Chine (continent) |
| Nom de marque: | Jkongmotor |
| Certification: | CE, ROHS,ISO9001 |
| Numéro de modèle: | JK42HS40-1704 17HS4401 |
| Quantité de commande min: | 3-10PCS |
|---|---|
| Prix: | US $3.9 - 6 / Pieces |
| Détails d'emballage: | avec le carton d'exportation. grande quantité avec la palette |
| Délai de livraison: | Pour des échantillons, 7-15 jours/pour le groupe, 15-25days |
| Conditions de paiement: | T/T, paypal, Western Union, L/C |
| Capacité d'approvisionnement: | 30000pcs/mois |
| Phase: | 2 | Angle d'étape (degrés): | 1,8 degrés |
|---|---|---|---|
| Tenir le couple: | 0.42N.m | Actuel/phase: | 1.7A |
| Poids: | 0.28KG | Longueur de moteur: | 40mm |
| Couleur: | black&sliver | Avances (non): | 4 |
| Couleur: | Argent/noir | Adaptez aux besoins du client: | OEM/ODM |
| Surligner: | moteur pas à pas électrique,moteur pas à pas de NEMA |
||
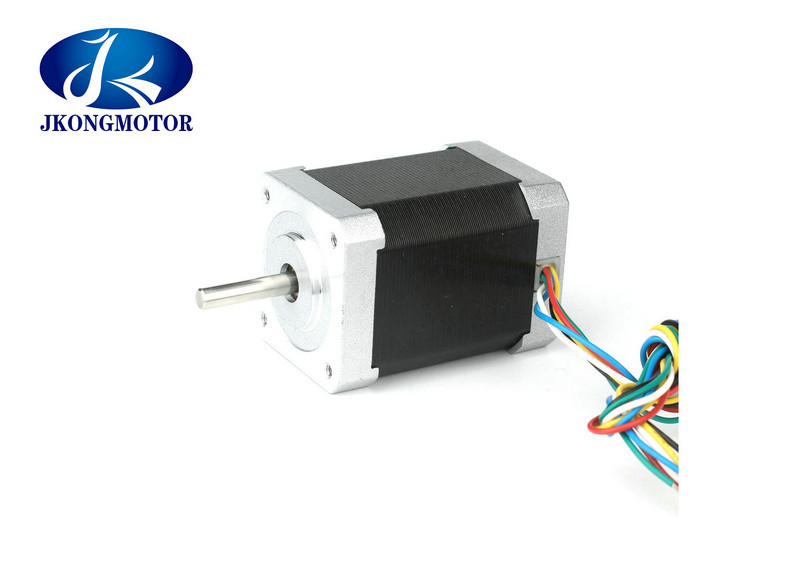
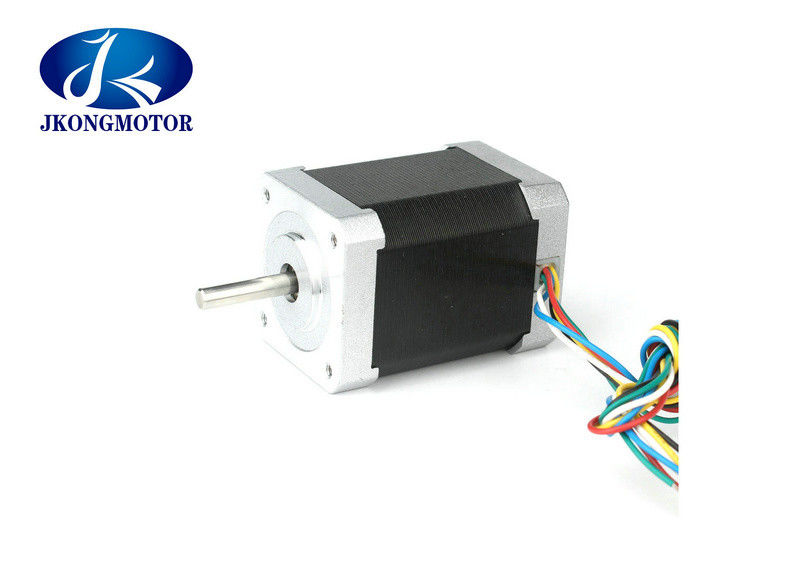
4.2kg. Moteur pas à pas de couple de haut de cm 2 moteur pas à pas de la phase Nema17 pour le robot de commande numérique par ordinateur
Un moteur pas à pas est un dispositif qui se déplace des étapes discrètes. Il a plusieurs bobines qui sont organisées en phases. Quand chaque phase active consécutivement, elle fait faire un pas le moteur. Avec le moteur pas à pas, vous pouvez obtenir le positionnement et le contrôle de vitesse précis. Il y a maily 3 méthodes qu'un moteur pas à pas peut être conduit. Les 3 manières motrices sont commande de plein-étape, commande de moitié-étape, et microstepping.
Pour choisir le moteur pas à pas approprié, vous avez besoin de telles données telles que le format de l'image, angle d'étape, couple, avez évalué l'ampère, le nombre d'avances de câblage, et etc.
Spécifications de Genaral de moteur pas à pas de commande numérique par ordinateur :
|
Article |
Moteur pas à pas |
|
Angle d'étape |
1.8° |
|
Hausse de la température |
80℃max |
|
Température ambiante |
-20℃~+50℃ |
|
Résistance d'isolation |
100 MΩ mn, 500VDC |
|
Résistance diélectrique |
500VAC pour 1minute |
|
Jeu radial d'axe |
0.02Max. (450g-load) |
|
Jeu axial d'axe |
0.08Max. (450g-load) |
|
Force radiale maximale |
28N (20mm de la bride) |
|
Force axiale maximale |
10N |
Caractéristiques électriques de moteur pas à pas de 42MM :
|
Modèle non. |
Angle d'étape |
Longueur de moteur |
Actuel /Phase |
Résistance /Phase |
Inductance /Phase |
Tenir le couple |
# des avances |
Couple de détente |
Inertie de rotor |
La masse |
|
|
(°) |
(L) millimètre |
Ω |
MH |
kg.cm |
Non. |
g.cm |
g.cm ^2
|
Kilogramme |
|
|
JK42HS40-0406 |
1,8 |
40 |
0,4 |
30 |
30 |
2,6 |
6 |
150 |
54 |
0,28 |
|
JK42HS40-1704 |
1,8 |
40 |
1,7 |
1,5 |
2,3 |
4,2 |
4 |
150 |
54 |
0,28 |
|
JK42HS40-1684 |
1,8 |
40 |
1,68 |
1,65 |
3,2 |
3,6 |
4 |
150 |
54 |
0,28 |
|
JK42HS40-1206 |
1,8 |
40 |
1,2 |
3 |
2,7 |
2,9 |
6 |
150 |
54 |
0,28 |
Note : des produits de la demande spéciale peuvent être faits selon la demande de client.
Pour conduire un moteur pas à pas vous avez besoin habituellement de l'équipement suivant :
le besoin 1.You de choisir le moteur pas à pas droit pour vos conditions de vitesse et de couple
Habituellement il y a NEMA8, NEMA14, NEMA17, NEMA23, NEMA34 et de NEMA42.
NEMA : La NEMA n'est pas une norme pour les caractéristiques électriques des moteurs pas à pas. Elle est se rapporte simplement à la taille de plaque avant. Par exemple NEMA17 signifie que le format de l'image est 42MM.
couple 2.Holding : Le couple se tenant est la quantité de couple exigée pour déplacer la pleine étape du moteur un tandis que les bobines activent et le rotor est stationnaire. L'enroulement de moteur pas à pas active même si le rotor lui-même est stationnaire. C'est de maintenir la charge en place tandis que stationnaire.
type 3.Shaft : Vous devez connaître la forme physique de cet axe de moteur pour assortir votre moteur pas à pas aux poulies, aux vitesses, et à d'autres connexions externes telles que des accouplements d'arbres. Il y a plusieurs formes communes. En outre, la longueur de l'axe doit être considérée.
Quelques axes communs sont énumérés ci-dessous :
Courant évalué : Ceci se rapporte au courant de pointe. C'est des spécifications utiles parce qu'il te permet de choisir une alimentation appropriée de conducteur et d'énergie pour votre moteur pas à pas.
Personne à contacter: Miss. Annie
Téléphone: +8615995098661
Télécopieur: 86-519-88713769
Répondent-: Bâtiment A2, zone industrielle de Hutang, Lingdao Rd, secteur de Wujin, Changzhou, China.Zip : 213162
Adresse usine:Bâtiment A2, zone industrielle de Hutang, Lingdao Rd, secteur de Wujin, Changzhou, China.Zip : 213162






